
Autonomous warehouse robots are programmable machines designed to move goods, manage inventory, and assist with order handling inside storage and distribution facilities. These systems often combine onboard sensors, navigation software, and task orchestration to operate without continuous direct human control, enabling coordinated movement through aisles, transfer of totes or pallets, and interaction with warehouse management systems used in United States operations.
In practice, these robots may perform discrete tasks such as transporting picked items to packing stations, repositioning inventory for faster access, or supporting replenishment workflows. Integration typically involves fleet management software, mapping of facility layouts, and interfaces with existing inventory databases to align robotic actions with order priorities and safety requirements common in U.S. facilities.

Comparative roles between AMRs, AGVs, and robotic picking systems often reflect trade-offs in flexibility and infrastructure. AMRs frequently need less fixed floor guidance and can adapt routes dynamically, while AGVs may require floor magnets, markers, or dedicated pathways. Robotic pickers tend to focus on item-level handling and may be integrated at packing lanes or picking stations to reduce repetitive manual tasks. U.S. facilities may choose combinations of these types based on throughput patterns and facility layout.
Integration with warehouse management and enterprise resource planning systems typically influences implementation scope and operational impact. Fleet orchestration software can coordinate dozens to hundreds of units, schedule charging cycles, and avoid congestion. When connected to inventory and order systems commonly used in the United States, robots can receive tasking that reflects real-time demand, which may change warehouse workflows and shift human roles toward supervision, quality control, and exception handling.
Operational metrics commonly monitored after deployment include throughput per hour, order-picking cycles, travel distance reduction, and uptime. In U.S. contexts, facilities often compare pre- and post-deployment workflows using these metrics to assess whether robotics rebalances labor allocation or alters footprint needs. Measurement frameworks tend to account for seasonal fluctuations and maintenance schedules to avoid attributing short-term variability to long-term effects.
Safety, standards, and workforce considerations are central to deployments in the United States. Facilities typically consult federal and industry guidance—such as Occupational Safety and Health Administration (OSHA) considerations and standards from industry groups—to define safe interaction zones, training protocols, and emergency stop procedures. These safety elements can shape layout decisions and the placement of human workstations relative to robotic traffic paths.
In summary, autonomous machines for warehouses combine navigation, material handling, and software coordination to change how storage and fulfillment tasks are executed in United States facilities. Choices among mobile platforms, guided vehicles, and picking systems depend on facility layout, throughput needs, and integration with existing systems. The next sections examine practical components and considerations in more detail.
Different robot classes address specific storage and fulfillment roles in U.S. warehouses. Autonomous Mobile Robots (AMRs) often handle dynamic transport and can reroute around obstacles, which may reduce the need for fixed conveyors. Automated Guided Vehicles (AGVs) tend to serve predictable transport lanes where site owners can invest in guidance infrastructure. Robotic picking units focus on item handling where accuracy and space utilization are priorities. Facilities in the United States often deploy mixed fleets so each robot class covers tasks matched to its design strengths, rather than relying on a single solution.

Facility layout and SKU characteristics commonly influence which robot types are selected. High-density shelving and carton-based assortments may favor mobile shelf-carrying systems, while large-volume pallet movements often remain with forklifts or pallet AGVs. In U.S. distribution centers handling fast-moving e-commerce SKUs, robotic pickers may be paired with human “chunk pickers” to manage variability in item size, fragility, or packaging. These combinations are used to balance throughput and handling precision.
Interoperability and communication are typical considerations when operating mixed fleets. Robots usually connect to fleet management or WMS interfaces that assign tasks, monitor locations, and enforce safety zones. In U.S. operations, common protocols and API integrations can enable robots from different vendors to operate in the same facility, though integration complexity may vary. Planners often evaluate network reliability, software version compatibility, and the ability to simulate workflows before committing to mixed deployments.
Maintenance models for different robot classes may differ in frequency and scope. AMRs with many moving parts and lidar or camera systems typically require routine sensor calibration and battery management. AGVs may focus maintenance on guidance systems and drive components. Robotic pickers need periodic end-effector inspection and vision system checks. U.S. facilities often formalize preventive maintenance schedules and spare-part inventories to preserve uptime and predictable performance across varied robot types.
Automation can modify process flows commonly seen in U.S. warehouses by changing where picking, packing, and staging occur. For example, bringing inventory to stationary pickers via mobile robots may reduce picker walking distances and concentrate human tasks around quality control. These shifts often result in reconfigured work zones and updated safety paths. In many U.S. operations, pilot implementations are used to validate flow changes and to collect baseline data on order cycle times before scaling.

Throughput and cycle-time considerations often motivate deployments in high-volume U.S. distribution centers. Robots that shorten travel time between storage and packing can increase orders completed per shift, particularly for repetitive, high-density tasks. However, actual gains typically depend on alignment with inventory profiles, order mix, and peak demand patterns common in U.S. retail and e-commerce sectors. Operators typically analyze seasonal peaks to size fleets and software scheduling.
Human roles commonly evolve alongside robotics deployments rather than being eliminated outright. In U.S. facilities, personnel may shift toward exception handling, system supervision, maintenance, and tasks requiring fine motor skills or judgment. Training programs and updated job descriptions often accompany technology adoption. Workforce engagement and clear communication about role changes are frequently reported as factors that influence operational acceptance and long-term stability of robotic systems.
Metrics and KPIs used to monitor impact usually include items per hour, order accuracy, mean time between failures, and energy consumption. Facilities in the United States may combine these operational KPIs with safety indicators such as near-miss reports and incident rates to maintain an integrated view of performance. Continuous monitoring helps refine routing rules, charging cycles, and task allocation within fleets to better match operational objectives.
Safety in U.S. warehouse robotics deployments frequently references federal guidance and industry standards. The Occupational Safety and Health Administration (OSHA) provides workplace safety frameworks that apply to facilities integrating automated equipment (OSHA). Industry standards and practices from groups such as the Robotics Industries Association (RIA) describe safety zones, guarding, and collaborative operation guidelines (Robotics Industries Association). Facilities commonly map these recommendations to site-specific risk assessments prior to operation.
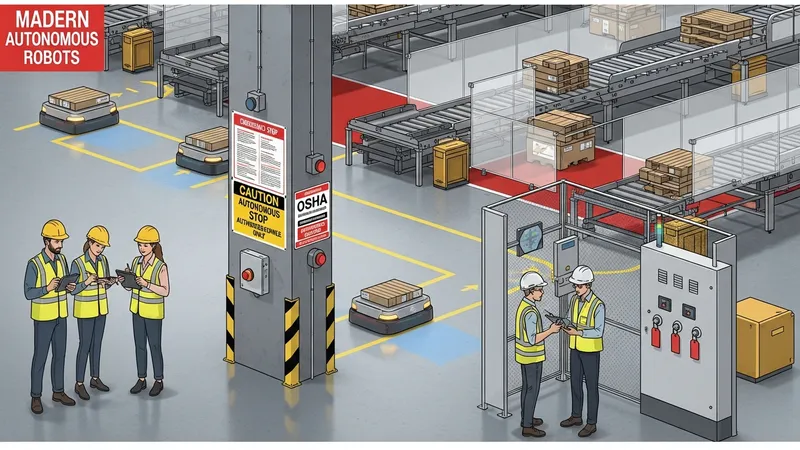
Designing human-robot interaction areas often involves zoning, signage, and emergency stop protocols that reflect U.S. workplace safety expectations. Typical measures include physical barriers for high-speed robotic operations, sensor-based slow-down zones near human stations, and clear training on emergency procedures. Organizations may also implement certified lockout/tagout procedures and documented task analyses to comply with workplace safety requirements.
Regulatory considerations can include local building codes, fire safety rules, and electrical standards that affect infrastructure changes when integrating robots. For instance, adding centralized charging stations or modifying racking to accommodate robotic navigation may require review by local authorities in the United States. Facilities often consult with legal and safety teams to confirm compliance with applicable codes and to document changes for audits.
Performance validation and commissioning processes commonly used in the United States include staged testing, operator training, and the establishment of maintenance logs. Commissioning may involve cross-functional reviews between operations, IT, and safety teams to ensure agreed behaviors and fail-safe responses. These preparatory steps are typically used to reduce operational disruption and to document adherence to safety standards and best practices.
Cost components for robotics projects in the United States often include capital for robot units, software licensing, integration, facility modifications, and ongoing maintenance. Individual AMR units may be quoted in ranges that reflect capability and payload; fleet software, site mapping, and systems integration commonly add to upfront expenditures. Facilities typically develop multi-year models that consider replacement cycles, energy costs, and expected uptime when evaluating total cost implications.
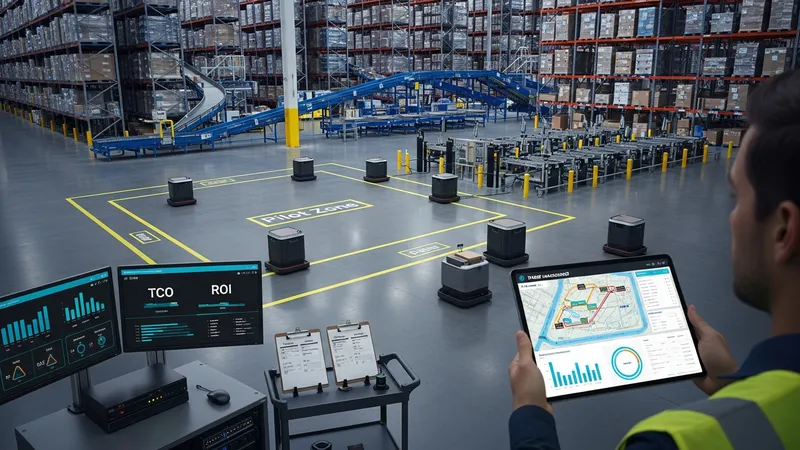
Deployment planning often begins with pilot programs to test integration with existing warehouse management systems and to measure real-world performance. Pilots in U.S. facilities commonly focus on a limited zone, enabling operators to collect data on throughput, reliability, and human-robot interactions before scaling. Pilot findings are typically used to refine routing logic, charging schedules, and staffing models to better match operational objectives.
Practical considerations include network infrastructure, cybersecurity, and spare-parts logistics. Reliable Wi-Fi and low-latency communications are frequently necessary to coordinate fleets in U.S. operations. Cybersecurity assessments may address access controls for fleet management systems and data flows to enterprise systems. Additionally, planning for spare batteries, wheels, and replacement sensors can reduce mean time to repair and maintain predictable availability.
Financially, organizations in the United States often evaluate robotics investments alongside labor trends, space constraints, and throughput targets. Cost-benefit assessments may incorporate conservative estimates of efficiency gains and account for integration timelines and training needs. Decision-makers commonly use phased rollouts and defined KPIs to monitor whether deployed systems achieve the operational improvements anticipated during planning.