
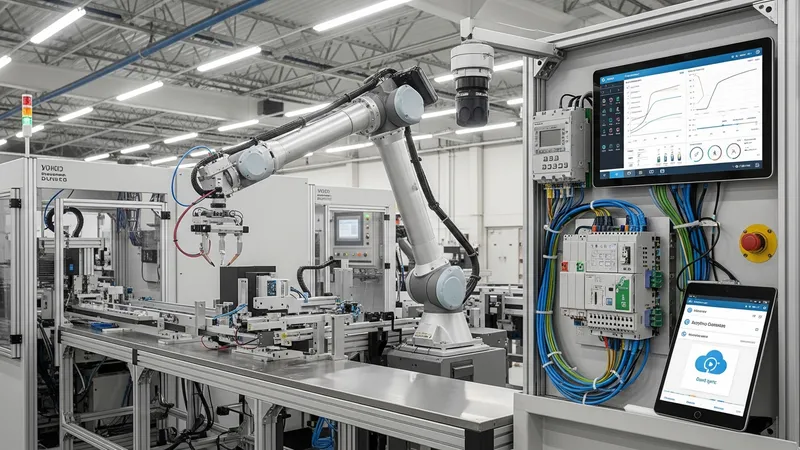
Advanced industrial machines integrate mechanical systems with electronic control and data processing to support manufacturing and production workflows.
Key technologies within advanced industrial machines typically include programmable control, networked sensing, motion control, and safety monitoring. Automation capabilities can vary from basic sequence control to adaptive process control that adjusts parameters in response to sensor data. Systems often incorporate diagnostic functions and local or remote interfaces for configuration, and they may be designed to integrate with enterprise systems for production planning and quality tracking.
Programmable logic and distributed control systems may serve as the backbone for deterministic sequencing and safety interlocks on machines. PLCs and DCS configurations typically handle discrete events, analog loops, and safety-rated inputs and outputs, and they can be arranged in hierarchical architectures for larger installations. Integration points often include fieldbuses or industrial Ethernet for sensor and actuator connectivity, and engineering tools allow manufacturers to map logical sequences and timing requirements. Design choices may affect maintainability and diagnostic capability.
Industrial robotics and motion systems can provide repeatable, accurate mechanical actions and may be deployed in single-machine cells or multi-robot lines. Motion control often relies on servo drives, encoders, and real-time control loops that maintain velocity and position within tight tolerances. Robotic systems typically require cell-level safety features such as physical guarding, light curtains, or safety-rated controllers. Task planning and path optimization may be handled by specialized software that interfaces with the machine controller and sensors to coordinate actions.
IIoT platforms and sensor networks often enable higher-level visibility into machine performance and may support condition-based maintenance. Sensors for vibration, temperature, torque, and electrical signatures can supply continuous data streams that edge processors pre-process before transmission to analytics services. Data architectures may include local historians and cloud storage, with considerations for latency, bandwidth, and cybersecurity. When deployed, these elements can inform maintenance scheduling, yield analysis, and long-term equipment management strategies.
Control software and human-machine interfaces (HMIs) typically provide operators and technicians with configuration, monitoring, and diagnostic access. HMIs may display real-time process variables, alarms, and historical trends, and engineering workstations often allow for logic updates and parameter tuning. Software may also implement safety functions and access controls to restrict critical operations to authorized personnel. Structured documentation and version control for control logic can reduce errors during updates and maintenance cycles.
Standards and regulatory considerations often influence machine design and automation capabilities, particularly for safety and electromagnetic compatibility. Frameworks such as safety integrity levels and machine directives may guide choice of safety controllers, protective devices, and validation testing. Compliance activities can include functional safety assessments, lockout/tagout procedures, and routine inspections. Attention to standards can assist in aligning machine behavior with operational policies and accepted industry practices.
In summary, advanced industrial machines combine control hardware, motion systems, sensors, software, and safety measures to perform coordinated production tasks. Key examples include programmable control systems, robotic and motion solutions, and IIoT-enabled sensing and analytics, each contributing to automation in specific ways. Design trade-offs often involve responsiveness, maintainability, integration complexity, and safety considerations. The next sections examine practical components and considerations in more detail.
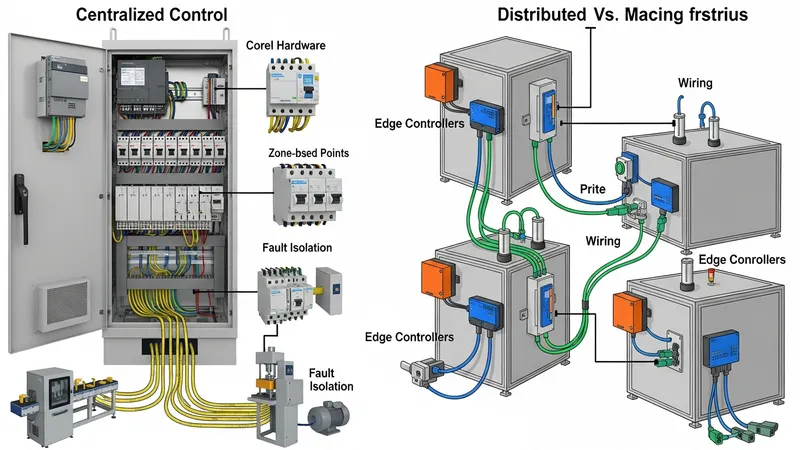
Control architectures for advanced industrial machines may range from single-controller setups to distributed frameworks that place processing near sensors and actuators. Centralized PLC-based designs often simplify engineering for smaller systems, while distributed control approaches can reduce wiring and improve modularity for larger installations. Real-time communication protocols and synchronization methods are critical when multiple controllers coordinate motion or process steps. Selection typically balances latency requirements, fault isolation, and scalability rather than claiming universal superiority for any single approach.
Timing and determinism can influence whether an architecture uses hard real-time controllers or mixes soft real-time services for higher-level tasks. Motion-critical loops often remain on dedicated hardware to preserve cycle-to-cycle accuracy, while supervisory tasks such as recipe management or data logging may run on separate servers. Designers may partition functionality so that shutdowns or diagnostics at one layer do not propagate unnecessary downtime to other layers. This separation often helps maintain availability while allowing for progressive feature additions.
Integration of safety functions typically requires architectures that support safety-rated controllers or certified safety modules. Safety architectures can be implemented as redundant or failsafe circuits that operate independently of normal control logic. Where machines interact with operators or other equipment, safety functions often include interlocks, safe torque off (STO) on drives, and monitored E-stops. Such designs may be assessed according to recognized safety frameworks to determine required performance levels and verification steps.
Practical considerations for architecture selection often include maintainability, commissioning time, and the availability of engineering tools. Modular architectures can permit parallel development and simpler replacement of faulty subsystems, which may reduce mean time to repair. Conversely, distributed systems may demand more sophisticated diagnostics and network management. Trade-offs should be evaluated against production requirements and available engineering resources, acknowledging that typical environments prioritize predictable operation and safety compliance.
Motion systems and robotics are commonly integrated to provide positioning, handling, and processing tasks within automated machines. Integration often involves coordinating motion controllers, robot controllers, and auxiliary devices such as grippers, vision systems, and conveyors. Communication standards and motion synchronization strategies may be used to ensure accurate handoffs between devices. Engineers typically assess the required axes, payloads, and cycle times to select suitable actuators and control approaches.

Robot programming paradigms may include teach pendant programming, offline simulation, and trajectory generation. Offline programming can reduce on-line commissioning time by allowing path validation in virtual environments before deployment. Vision-guided robotics may enable adaptive handling where parts vary in position or orientation; these systems often use cameras combined with processing algorithms to provide pose estimates that adjust robot motions. Such configurations may improve flexibility but can add complexity to system tuning and maintenance.
Mechanical design and fixturing are important considerations when integrating motion equipment, since compliance, backlash, and resonance can affect accuracy and repeatability. Motion control strategies such as feedforward, PID tuning, and trajectory shaping can mitigate some mechanical limitations. Selection of encoders, resolvers, and feedback devices typically depends on environmental conditions and required precision. Engineers often document expected tolerances and perform verification tests during commissioning to confirm performance.
Safety and collaborative operation are additional aspects to address when robots and humans share space or interact closely. Collaborative robot cells may use reduced speed, force limits, or protective sensing to lower risk, while traditional cells rely on physical barriers and interlocks. Risk assessments can guide the selection of protective measures and influence cycle design. Overall, motion and robotics integration often emphasizes predictable motion performance, measurable positioning accuracy, and clearly defined safety boundaries.
Sensors and IIoT components provide the data that enables monitoring, diagnostics, and higher-level process control in advanced industrial machines. Typical sensor types include proximity, photoelectric, temperature, pressure, vibration, and current transducers, each suited to different monitoring needs. Edge devices may preprocess data to filter noise, detect anomalies, or aggregate signals before transmitting to historians or analytics platforms. Decisions about sampling rates and communication protocols often reflect the balance between real-time needs and bandwidth constraints.
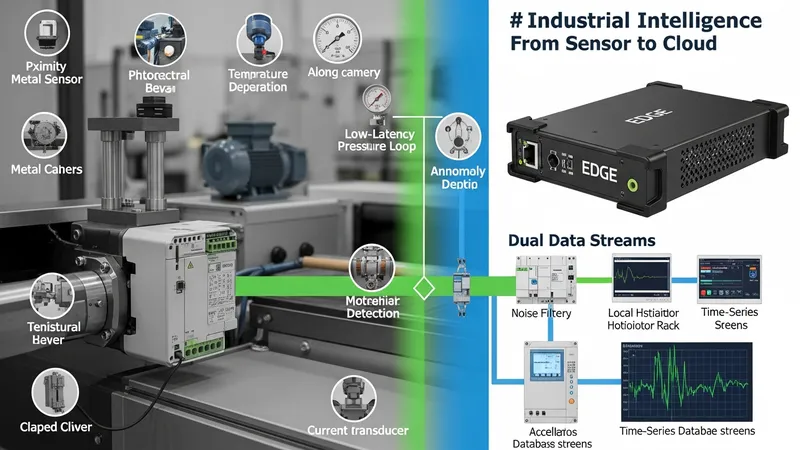
Data strategies commonly separate operational control loops from analytics and reporting functions. Control loops require deterministic, low-latency access to sensor readings, while analytics can tolerate higher latency and benefit from larger historical datasets. Implementation choices may include local historians for short-term playback, time-series databases for longer-term trends, and secure gateways for transferring data to enterprise systems. Considerations include data retention policies, network reliability, and protection of sensitive operational information.
Predictive maintenance models often rely on combining multiple sensor streams to detect early signs of degradation. For example, vibration and current signatures may jointly indicate bearing wear or motor imbalance. Model development typically uses historical failure data and may employ statistical or machine learning techniques; however, models often require ongoing validation to remain effective as production conditions change. Organizations may view predictive analytics as a support tool for maintenance planning rather than an automatic replacement for inspection routines.
Cybersecurity and lifecycle management are important when adding networked sensors and IIoT platforms to machines. Security measures may include network segmentation, authentication, encrypted communications, and regular firmware updates. Lifecycle practices often cover firmware version control, spare parts availability, and supplier support for edge devices. When designing data strategies, stakeholders often weigh the benefits of increased visibility against the need to manage risk and maintain long-term operability.
Safety and compliance considerations frequently drive requirements for machine design and automation capabilities. Functional safety approaches may involve specifying safety performance levels, implementing redundant sensing and control paths, and validating safety functions through testing and documentation. Regulatory frameworks and industry standards commonly guide these activities and can affect component selection, verification schedules, and operator training needs. Designers often incorporate traceable test records and change control processes to support ongoing compliance.

Operational considerations for advanced machines often include planned maintenance, spare parts logistics, and training for technicians and operators. Maintenance strategies may range from scheduled preventive tasks to condition-based interventions informed by sensor data. Documentation such as wiring diagrams, logic descriptions, and maintenance procedures typically supports troubleshooting and reduces downtime. Organizations may plan for incremental capability upgrades while preserving baseline functionality to avoid production disruption.
Interfacing machines with higher-level enterprise systems often requires mapping production data, quality metrics, and throughput information into manufacturing execution systems. Standard communication models and data schemas can simplify integration, but custom adaptations may be necessary for legacy equipment. Clear definitions of data ownership, reporting cadence, and error handling protocols can reduce ambiguity during integration projects. Teams often pilot integrations on limited scopes before full deployment to validate mapping and performance.
Human factors and ergonomic design also influence the practical deployment of advanced machines. Operator interfaces, access points for maintenance, and handling aids can affect safety and efficiency. Good practice often includes involving operators and maintenance staff early in design reviews to identify potential usability issues. Continuous monitoring of operational metrics and periodic reviews may reveal opportunities to refine workflows, balancing automation capability with human oversight and maintainability.